nvidia isaac sim
https://github.com/isaac-sim/IsaacSim
首先,为什么要用Isaac Sim进行仿真?俗话说一图胜千言,那视频得胜万言了,我们直接上NVIDIA官方视频:
Isaac Sim
最直接的感受就是照片级的仿真画面,以及与AI算法的集成,硬件加速、基于开源的USD格式……
行了,视频已经胜万言了,话不多说。让我们一起来一步一步做出类似视频里的效果吧。
首先简单说一下开发环境。Isaac Sim是基于NVIDIA Omniverse 平台的一个工具,因此需要首先安装Omniverse,Isaac Sim及Omniverse对硬件有一定要求,特别是显卡,具体可以参考官网:
https://docs.omniverse.nvidia.com/app_isaacsim/app_isaacsim/requirements.html此次教程中的开发环境:硬件:
- CPU:Intel Core i7
- GPU:RTX 3080
- RAM:32GB
- Storage:SSD
软件:
- Ubuntu 20.04
- NVIDIA Omniverse 1.6.10
- Isaac Sim 2022.1.1
- Blender 3.4.0
步骤:
官网下载Omniverse Launcher并安装:
https://docs.omniverse.nvidia.com/app_isaacsim/app_isaacsim/install_basic.html
安装好之后,启动Omniverse Launcher。为便于大家快速找到重点,教程中的图片用蓝色线、框对关键信息进行了标记。
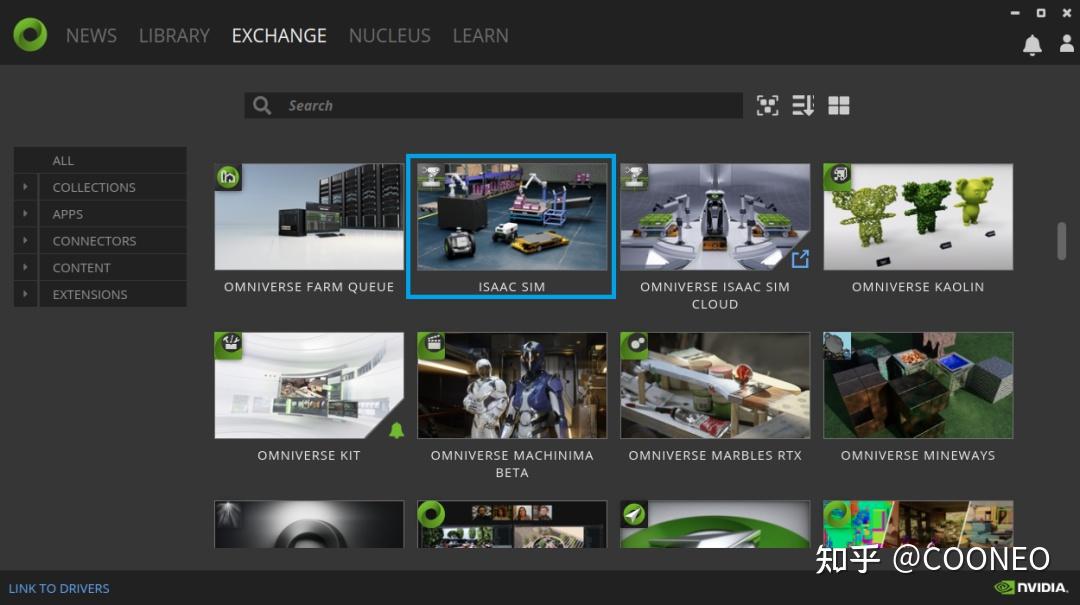
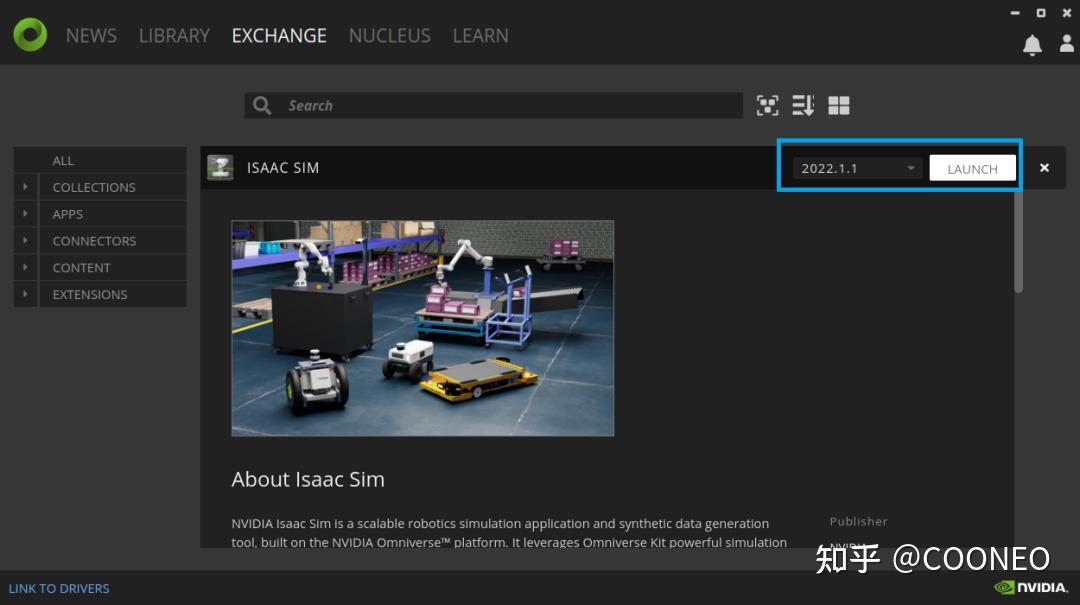
在EXCHANGE栏可以找到Isaac sim。可以找到版本信息以及安装或启动按钮,安装之后在LIBRARY栏也可以快速找到并启动Isaac sim:
启动之后,会有各种模式的选项,我们现在选择默认选项即可:

这就是启动之后的界面啦:

今天的教程我们使用的素材是经典的开源模型:NEOR mini,通过下面的GitHub就可以下载,只需下载车身和一个车轮即可:

因为Isaac sim目前并不支持直接导入STL格式的文件,因此我们需要先进行格式转换,这里就要用到另一款强大的开源软件Blender:
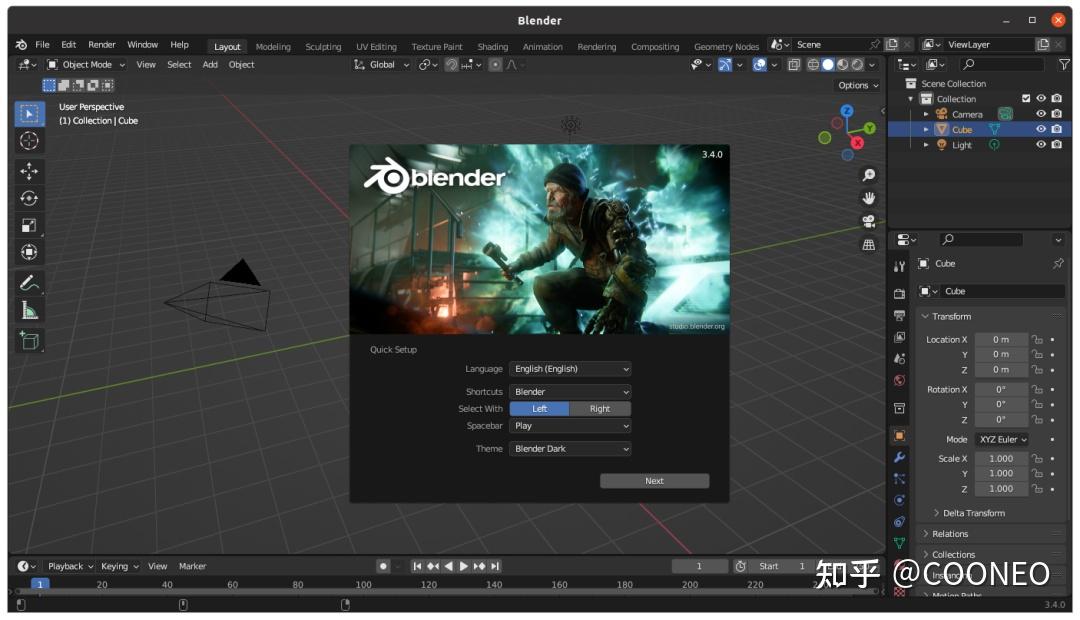
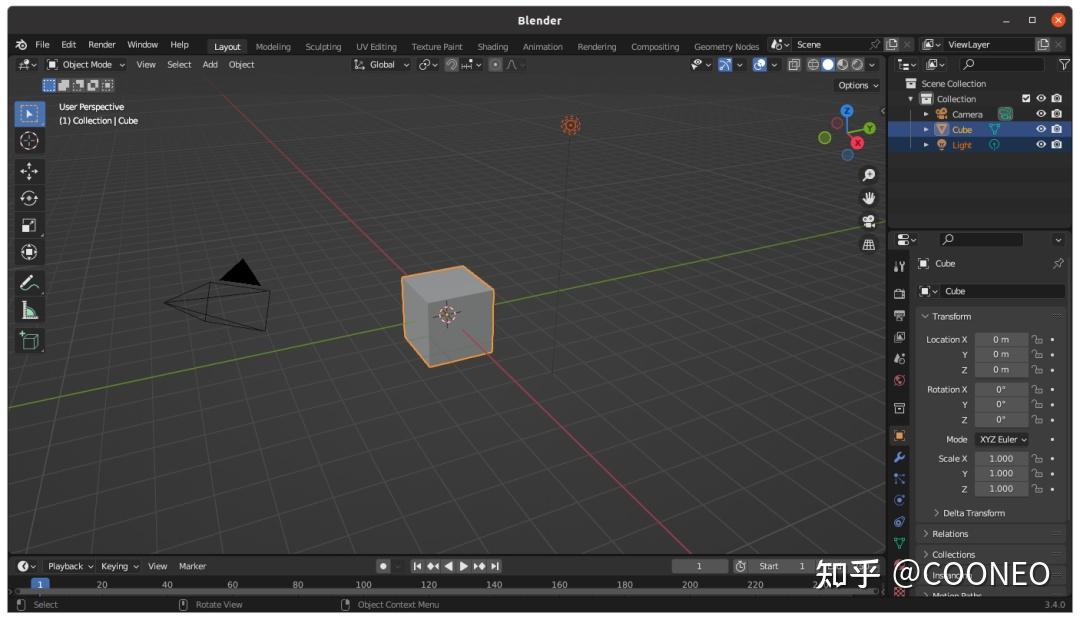
启动Blender,删掉默认的立方:
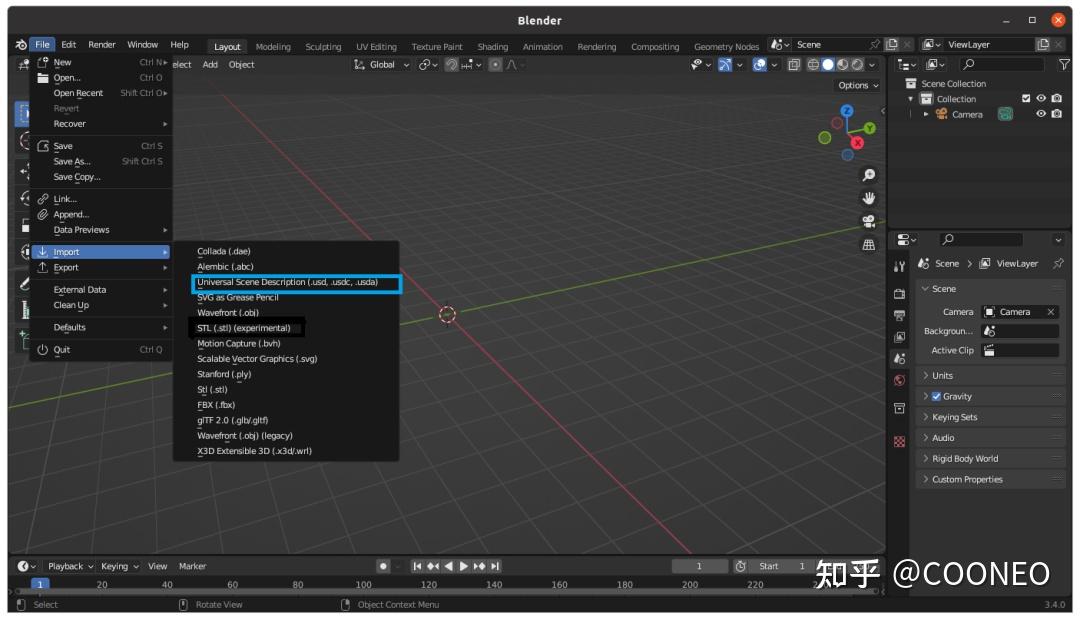
首先我们看看Blender支持导入的格式,这里可以看到其支持USD格式导入:
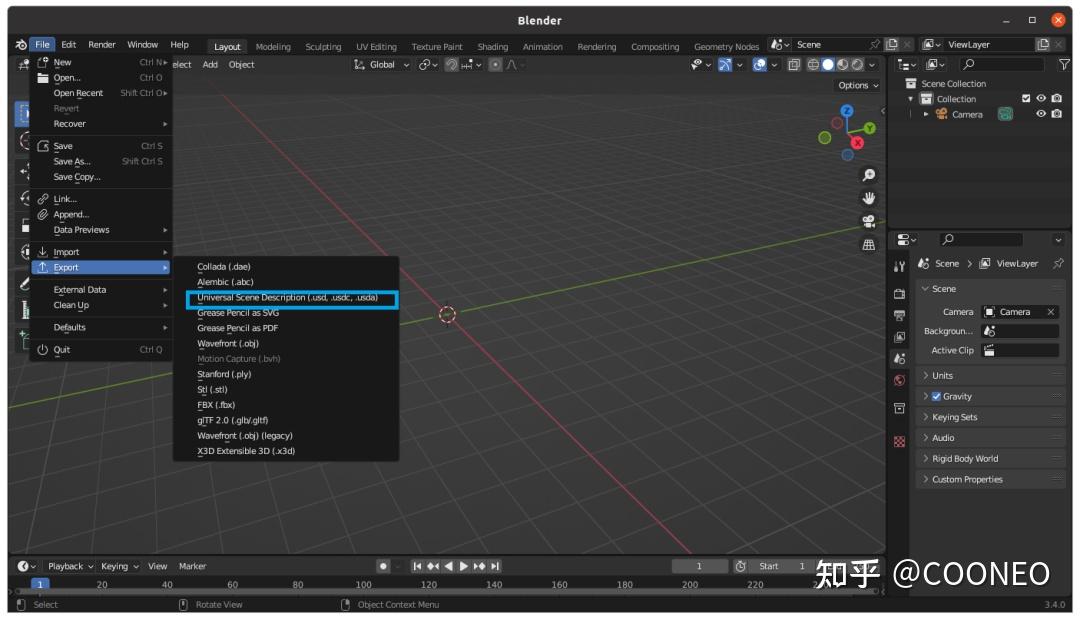
并且也支持导出USD格式,所以我们也可以直接导出USD格式,大家可以试试。今天我们介绍导出为另一种格式。
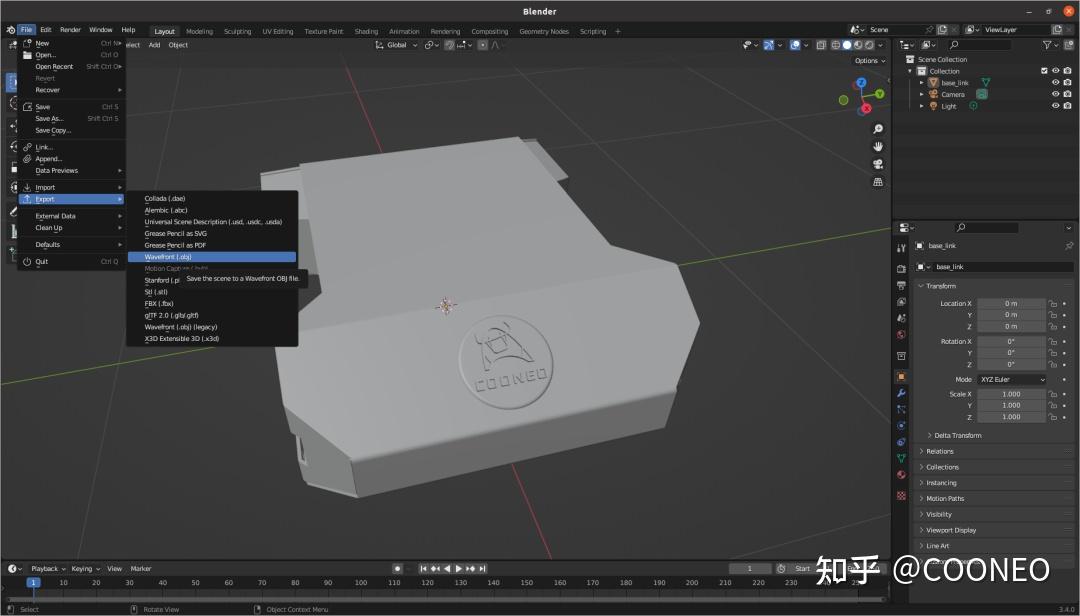
首先导入车身STL文件:


然后导出为.obj格式。
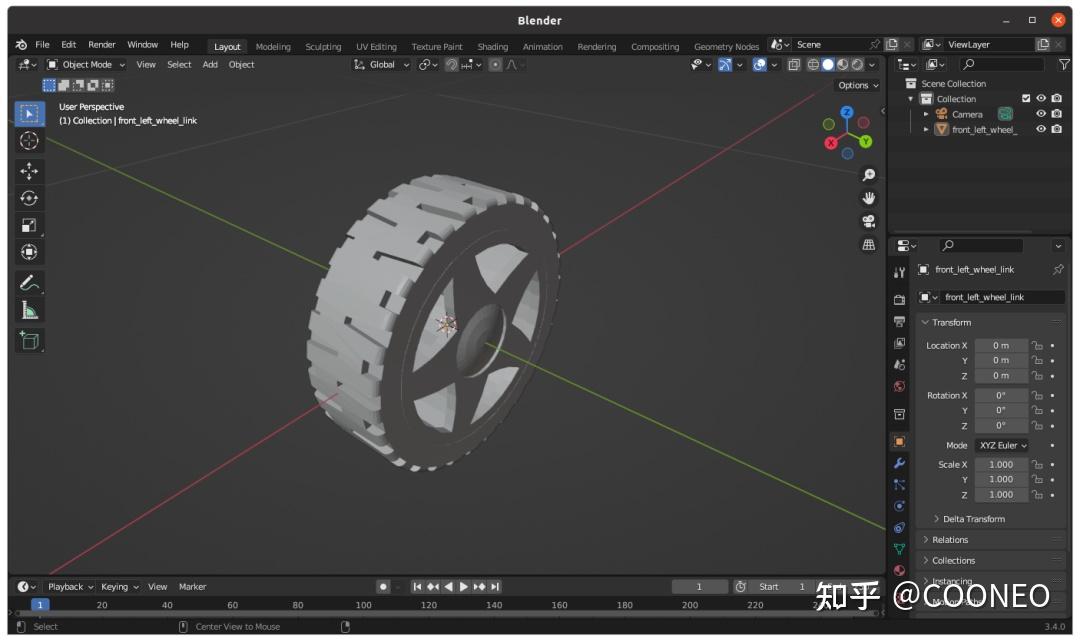
同样的,导入并导出车轮的相应文件。
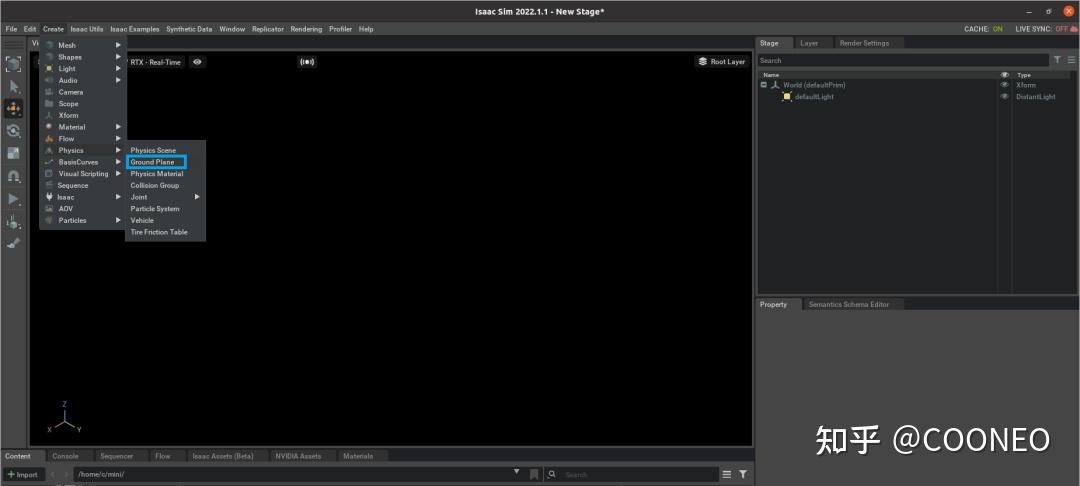
回到Isaac sim,我们首先建立一个Ground plane, 其拥有碰撞属性。
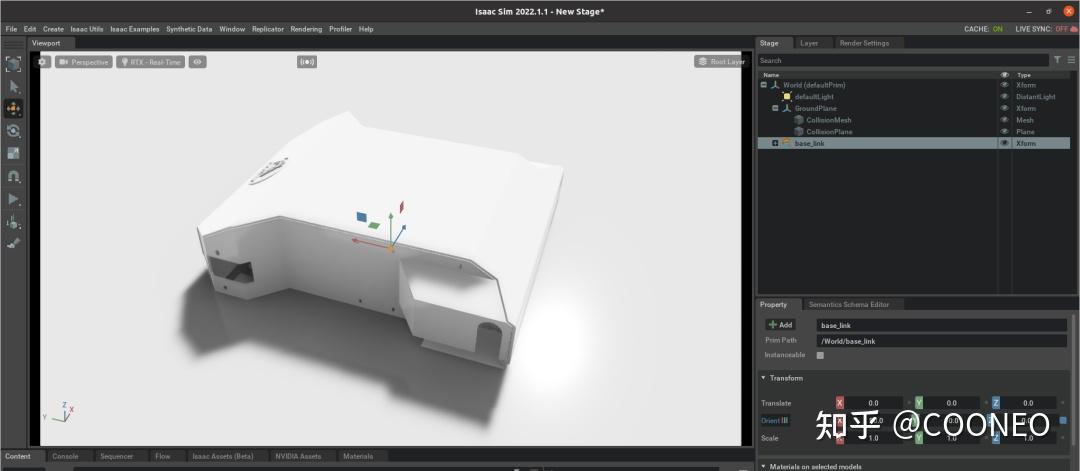
接下来导入已转换好格式的车身文件:

这里我们可以看到Isaac sim目前支持导入的格式:

导入NEOR mini车身:
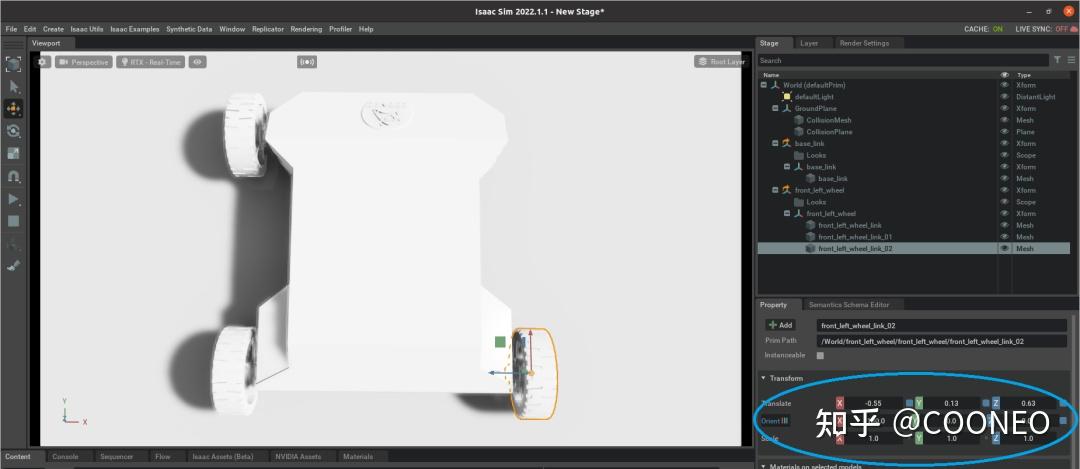
接着导入车轮:
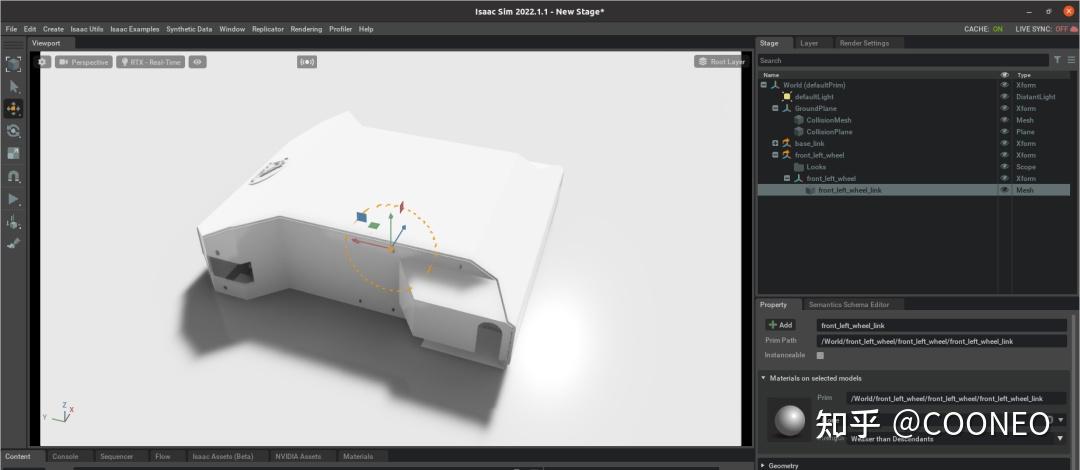
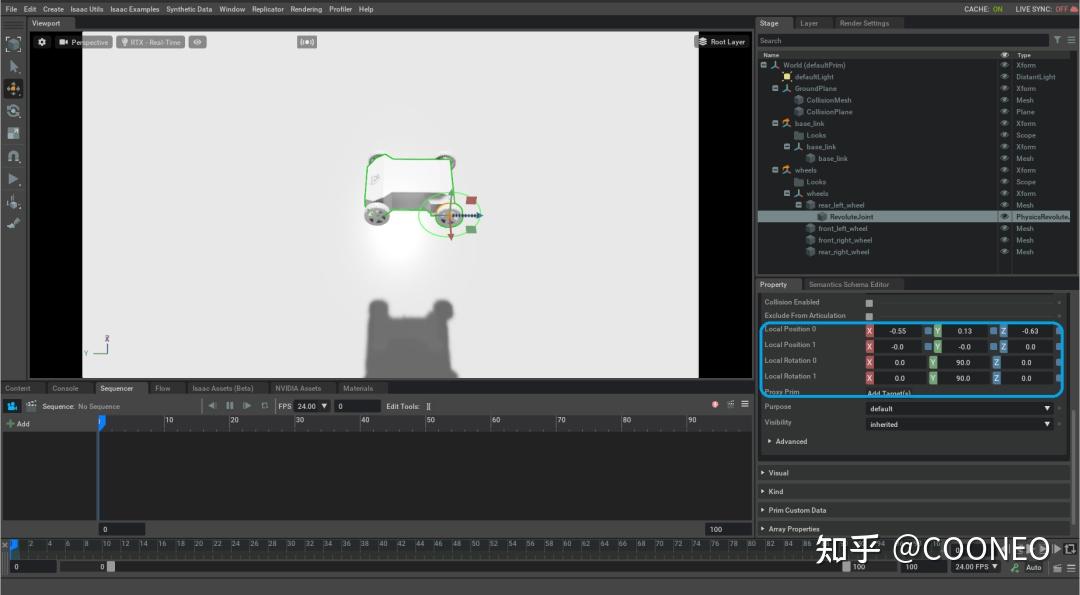
车轮导入后需要将其移动到合适的位置,下边框选的参数可以作为参考,第一个车轮调试好之后,其它的车轮就比较简单了,首先选中第一个车轮,复制一个:
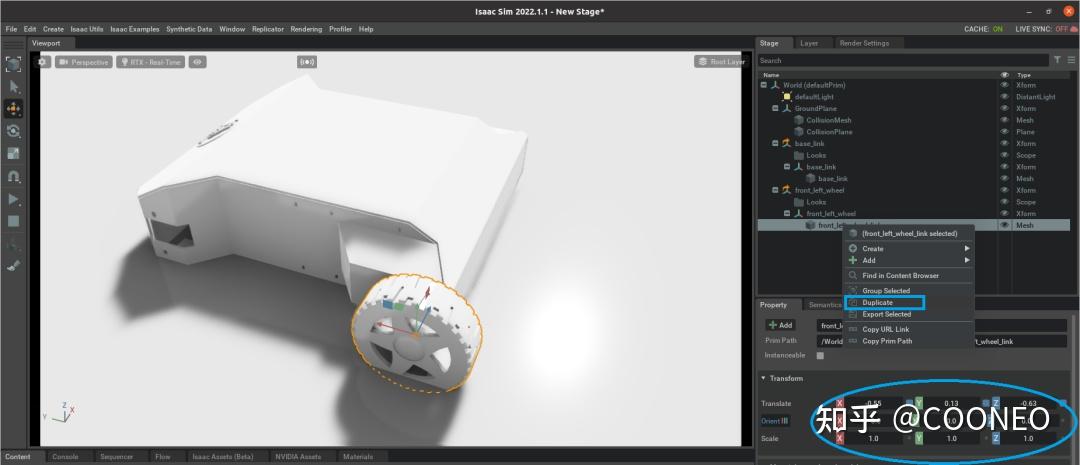
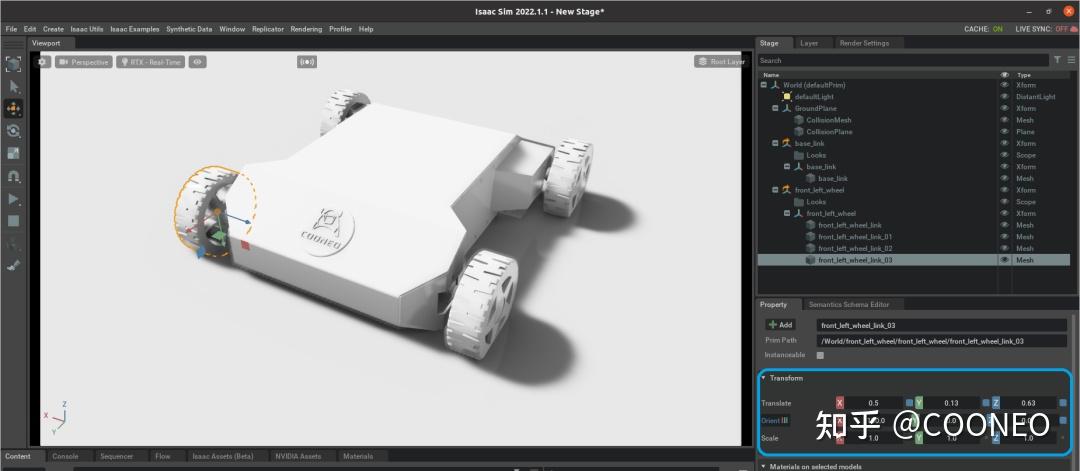
然后移动到合适的位置,只需调整X轴的参数即可:

接着再次选中第一个车轮,再复制一个:

然后移动到合适的位置,这里主要的区别是车轮进行了翻转:
复制刚刚调整好的车轮:

向前移动, 与前边的车轮对齐就可以了:
在调整的时候需要注意这里有两种坐标模式:全局和局部。黄颜色小点时为局部坐标系,在这一坐标系下调整位置会比较方便。
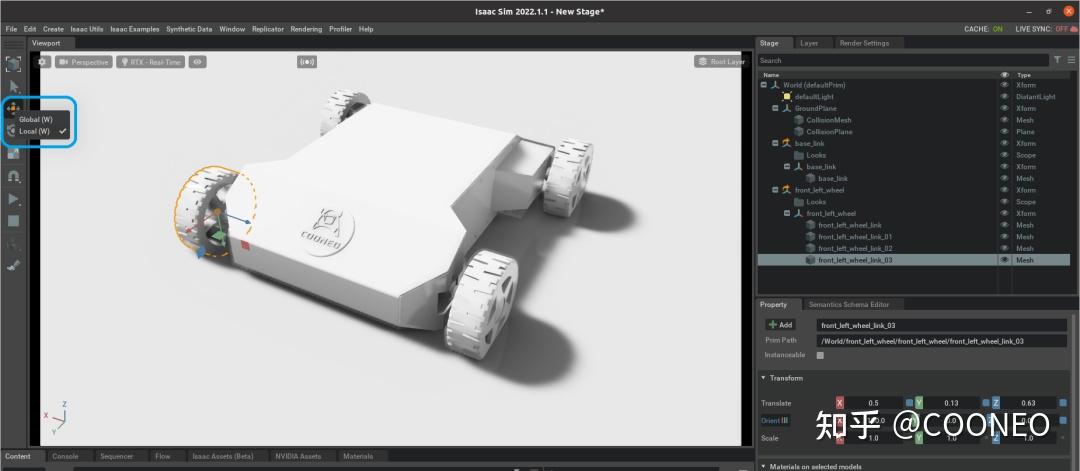
到这里,小车的几何形状就呈现出来啦
接下来我们给其赋予物理属性。如下图,选中车身和全部车轮,右键,依次选择Add > Physics > Rigid Body with Colliders Preset。
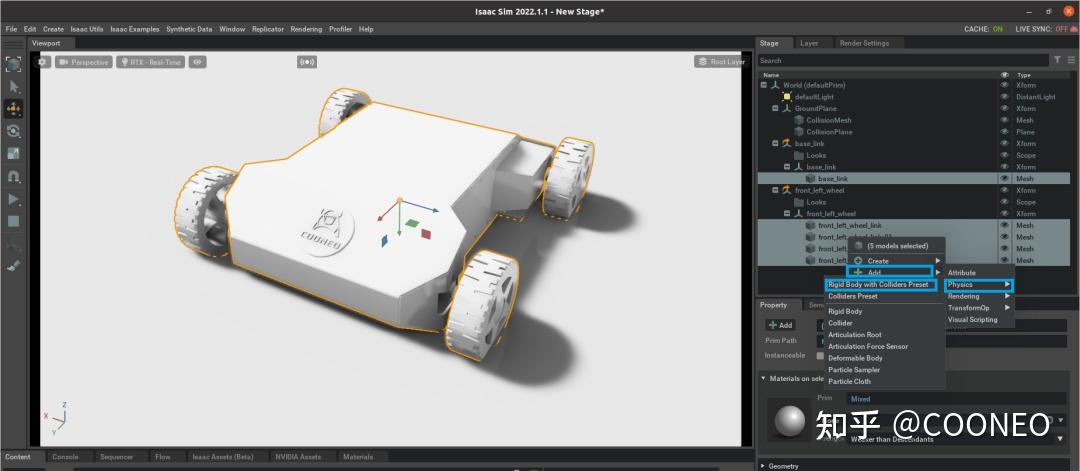
然后我们把小车移动到地面之上,顺便看看整体效果:
Isaac sim 机器人仿真
接着我们点击左边栏的播放键,看看会有什么现象:
Isaac sim 机器人仿真
可以看到小车已经具有重力和碰撞的物理属性。那怎么让小车跑起来呢?我们先来把个部件的名称规范一下,双击各部件名字就可以修改名称。

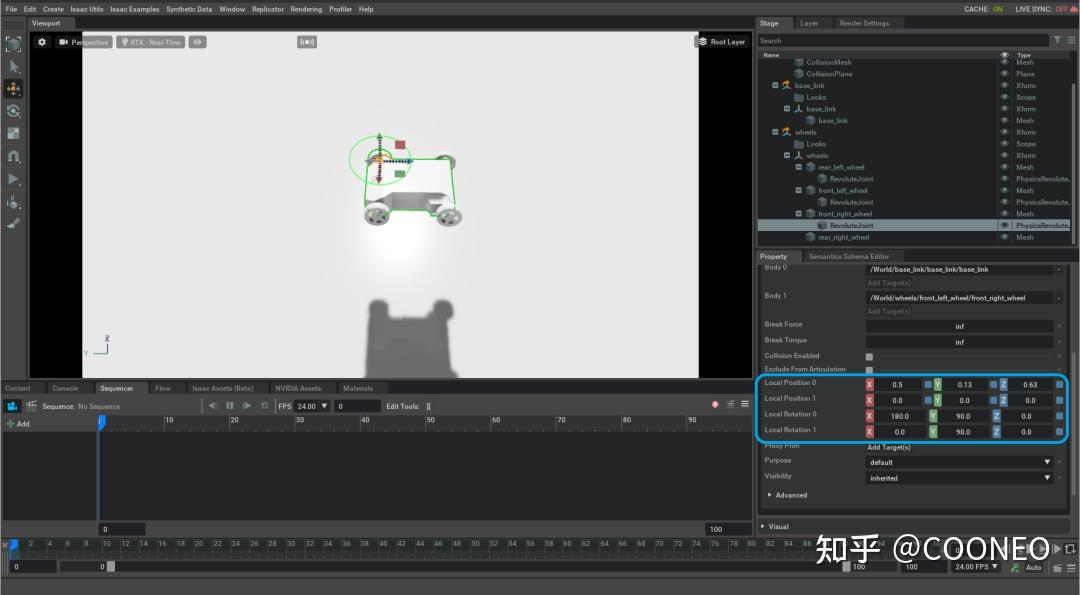
然后我们依次选中车身和左后轮,右键,如下图所示依次选择Create > Physics > Joints > Revolute Joint。

软件会配置一些参数,但需要进行确认和调整旋转方向:
同样的方式将车身与另外三个车轮进行Revolute Joint的添加:

参考相应参数:


上面只是添加了物理上的关联,接下来我们还需要添加驱动才能让小车动起来,选中四个Revolute Joint,右键,依次选择Add > Physics > Angular Drive。

接下来我们需要对两侧的两组车轮分别进行速度和阻尼的设置:

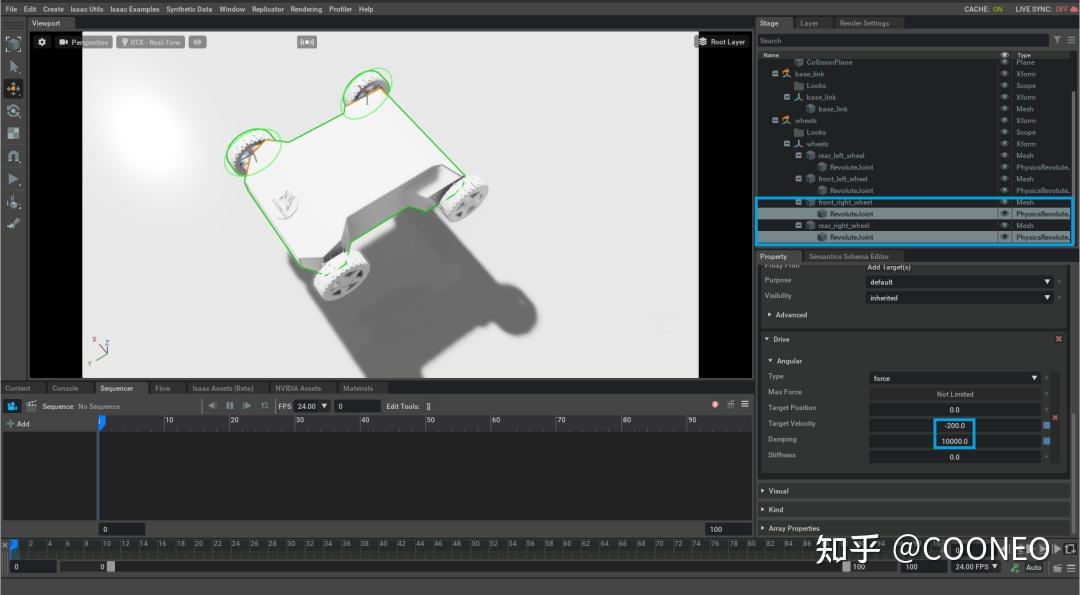
至此,小车就可以跑起来啦:
Isaac sim 机器人仿真
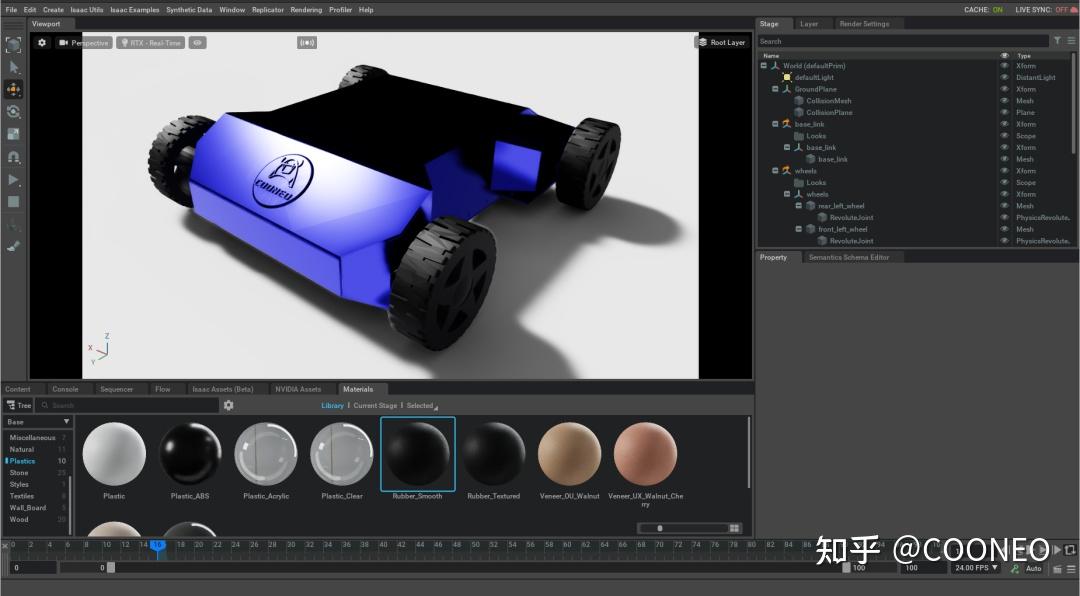
既然Isaac sim的特点之一就是照片级的仿真以及实时渲染,那我们就来对小车的外观进行一下美化,我们直接上材质。在视窗下方的选项中可以找到材质栏,里边已经有NVIDIA内置的一些材质,我们可以在左边的列表中选择金属,选择一个拖动到车身上就可以看到效果啦:
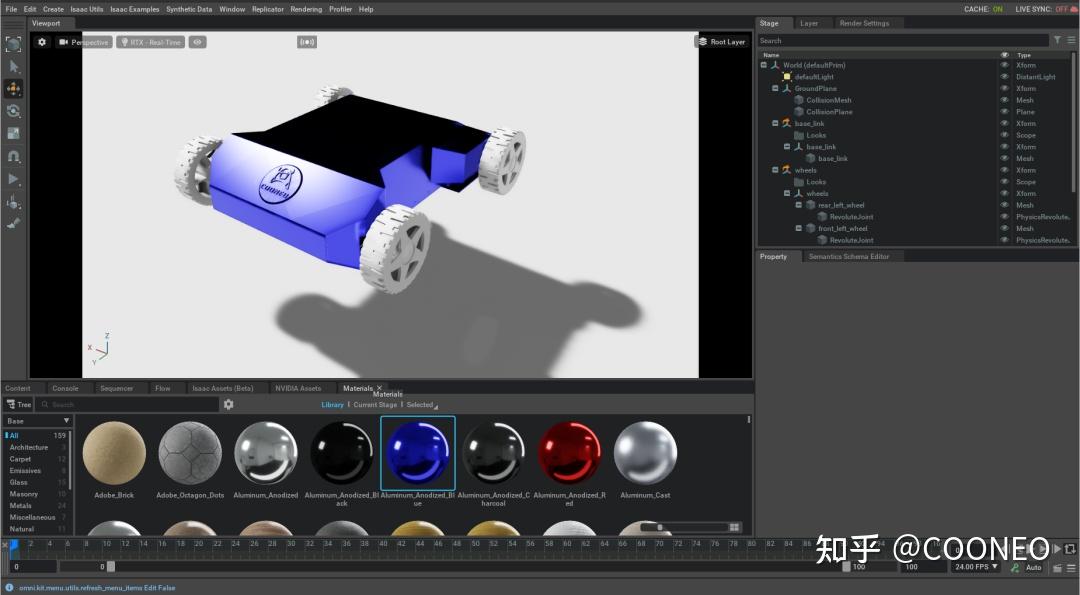
在左边列表选择塑料材质, 选择其中一个拖动到车轮上:

这就是整体效果啦
来试试其它材质,并且加入场景:
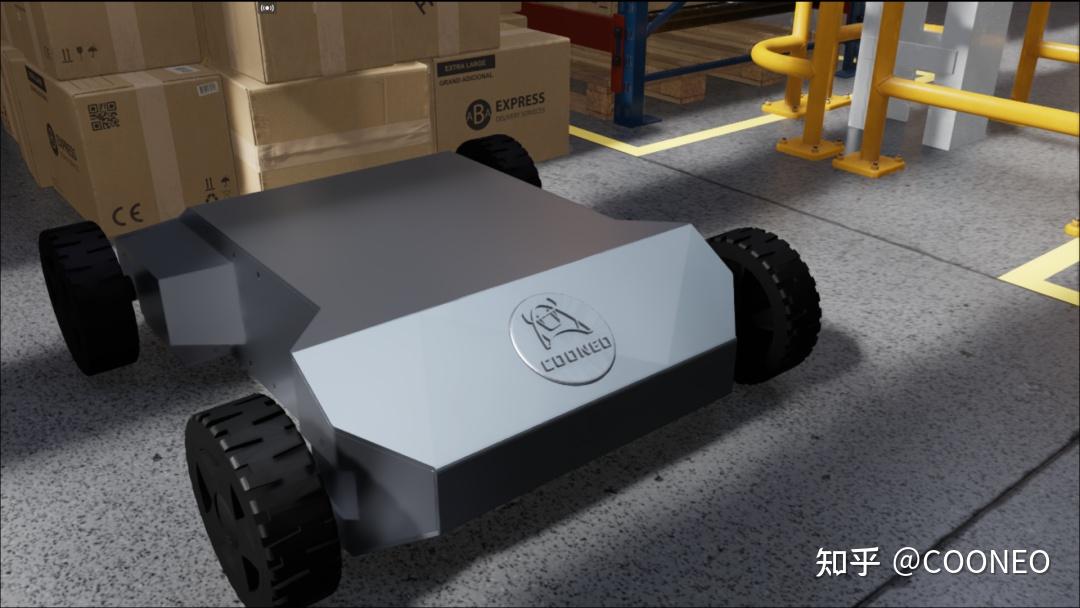
Isaac sim 机器人仿真
这个效果比较接近NEOR mini的真车效果:

Isaac sim 机器人仿真
让NEOR mini在里面逛逛吧:
Isaac sim 机器人仿真
下面给出一个融合所有资料后对 NVIDIA Isaac Sim 平台的全面解析,从平台概述、系统架构、工作流程、入门指南、主要特性、应用场景到最新发展,全方位剖析这一先进机器人仿真平台。
NVIDIA Isaac Sim 平台全面解析 —— 从入门到应用
NVIDIA Isaac Sim 是一款基于 NVIDIA Omniverse 构建的机器人仿真平台,旨在为研发人员、工程师和学术研究者提供一个物理精确、视觉真实的虚拟环境,用于设计、测试和部署 AI 驱动的机器人系统。其核心优势在于利用 GPU 加速实现高保真物理仿真、实时光线追踪渲染以及多传感器数据生成,同时支持与 ROS、Python 等主流工具链无缝集成。
1. 平台概述与发展历程
• 起源与演进:
Isaac Sim 最初作为一个参考应用出现,专注于机器人仿真和合成数据生成(SDG),并随着版本不断迭代(如最新的 4.0/4.5 版本)发展为一个完整的平台。它不仅加速了机器人从设计到部署的过程,而且在工业自动化、仓储物流、自动驾驶等领域展现出巨大潜力[1][13][14]。
• 核心定位:
作为一个开放、可扩展的仿真平台,Isaac Sim 支持用户自定义基于 OpenUSD 的模拟器,并能够集成到已有的测试与验证流程中,这使得它无论在学术研究、工业应用还是创业项目中都具有极高的适应性。
2. 系统架构与技术基础
Isaac Sim 的架构采用模块化设计,各层次协同工作,共同实现高精度仿真与数据生成:
• 底层平台:
构建于 NVIDIA Omniverse Kit 之上,利用 OpenUSD 文件格式实现场景与模型在不同工具间的无缝传递,同时依托 NVIDIA PhysX 引擎(最新版本支持 PhysX 5.4)实现刚体、关节以及软体碰撞等物理仿真。
• 导入与转换层:
平台支持多种模型文件格式(如 USD、URDF、MJCF、Onshape 文件)的导入与转换,使得用户能够快速将已有机器人模型和环境资产整合进仿真系统[6]。
• 功能扩展层:
内置丰富扩展,如 ROS Bridge(实现与 ROS/ROS2 的双向通信)、Synthetic Data Recorder(支持合成数据集生成与保存)等,极大地拓展了平台的应用范围。
• 用户交互层:
针对不同需求,提供桌面图形用户界面(GUI)和 Headless 模式。GUI 适合直观场景构建与实时操作,Headless 模式则更适合自动化测试和远程部署[6]。
3. 工作流程(Pipeline)
Isaac Sim 的开发流程可划分为三个核心工作流,形成一个从环境搭建到数据采集再到算法训练的闭环体系:
3.1 合成数据生成
• 目标与方法:
利用 Omniverse Replicator 引擎生成用于训练感知模型的合成数据(如 RGB 图像、深度图、语义与实例分割标注)。这种数据生成方式支持领域随机化(改变光照、材质、布局等参数),有助于提高模型在真实环境中的鲁棒性[9][14]。
3.2 软件在环测试
• 测试全栈:
在仿真环境中对整个机器人软件堆栈进行验证。通过 ROS/ROS2 桥接,可以实时控制虚拟机器人、采集传感器数据,并测试运动控制、路径规划、避障等算法,有效在部署前发现潜在问题[1][8]。
3.3 机器人学习
• 利用 Isaac Lab:
Isaac Lab 为机器人学习提供了统一的开源框架,支持强化学习、模仿学习和运动规划。平台通过精确的物理和传感器仿真,为训练智能决策模型提供了理想环境,并支持本地或云端的容器化部署[5]。
同时,用户可以通过三种主要方式与 Isaac Sim 交互:
• 图形界面 (GUI): 直观构建场景与观察仿真效果
• Python API: 实现自动化脚本和高级功能扩展
• ROS/ROS2: 与现有机器人系统无缝对接
4. 新手入门指南
对于刚接触 Isaac Sim 的初学者来说,系统性地掌握以下步骤尤为关键:
4.1 系统与硬件要求
• 操作系统: 支持 Windows 和 Ubuntu
• 内存: 至少 32GB
• GPU: 推荐使用 RTX 2070 及以上型号,充分利用 GPU 加速
• 显卡驱动: Linux 最低 470.57+;Windows 最低 471.41+
(确保硬件资源满足高保真仿真和实时渲染的要求)[6]
4.2 安装方式
• Omniverse Launcher 安装:
适用于需要图形界面的用户,通过 Exchange 选项卡搜索“Isaac Sim”进行下载安装。
• NGC 容器:
对于高级用户,可从 NGC 平台拉取容器镜像,方便在服务器环境中部署。
• pip 安装:
自 4.0 版本起支持 pip 安装,但需要注意依赖(如 GLIBC 版本、CUDA 和 GPU 驱动)的要求[11]。
4.3 初步实践
• 导入机器人模型:
使用向导功能或预置资产快速导入各类机器人模型(如人形、机械臂、四足机器人、AMR 等)。
• 构建虚拟环境:
利用预建的 3D 资产库构建仿真场景,并配置物理参数与传感器(如 RGB-D 相机、LiDAR 等)。
• 运行模拟与数据采集:
通过运行仿真场景观察机器人行为、调试控制算法,并生成合成数据集,用于后续算法训练。
• 资源学习:
借助 NVIDIA Learn 的“模拟你的第一个机器人”课程、官方文档、视频教程以及开发者论坛(包括 Discord 讨论组)快速入门[8][10]。
5. 主要特性与功能亮点
• 物理仿真:
利用 NVIDIA PhysX 引擎实现机器人关节、刚体和软体碰撞的高精度模拟,最新版本还加入了对耦合关节的精确建模能力[3][11]。
• 高保真渲染:
基于 NVIDIA RTX 技术实现物理基础渲染(PBR),呈现出照片级真实效果,包括精确的光照、阴影和反射效果[7]。
• 环境与资产创建:
提供超过 1000 个 SimReady 3D 资产,用户可以快速构建复杂的仿真场景,涵盖从仓储物流到工业生产的各类环境[3][8]。
• 传感器仿真:
支持 RGB-D 相机、LiDAR、IMU 等多种传感器的仿真,并输出真值数据,满足感知系统训练的需求[6]。
• 扩展性与集成:
模块化设计使得平台可以方便地与 ROS/ROS2 以及其他 NVIDIA 技术(如 Isaac ROS、NITROS、GR00T Blueprint)进行深度集成[12]。
6. 应用场景分析
Isaac Sim 的广泛适用性使其在多个领域均有出色表现:
• 研发与教育:
为学术和科研提供一个低成本、高安全性的测试环境,支持机器人学习、运动规划与算法验证,降低实际部署风险[1]。
• 工业制造:
帮助企业仿真机械手和自动化生产流程,通过测试运动控制算法和碰撞检测,优化工业机器人应用[1]。
• 仓储物流:
通过构建数字孪生仓库和传送带场景,仿真自主移动机器人的导航和调度,提高仓储管理效率。例如,亚马逊已利用类似技术实现自主仓库自动化[9]。
• 自动驾驶与移动机器人:
为自动驾驶和自主移动机器人(AMR)提供一个虚拟测试平台,验证多机器人协作、车队路线规划等复杂任务[1]。
7. 最新发展与未来趋势
• 新版本特性(4.0/4.5):
• 参考应用模板: 提供最小模板与完整模板,简化启动流程。
• 改进 URDF 导入与关节配置: 用户界面更友好,允许单独设置关节驱动。
• 关节可视化工具: 实时监控物理属性,如位置、速度和加速度。
• 数据统计与模拟准确性提升: 通过全动量守势和精细参数调控,提高仿真精度。
• 集成 NVIDIA Cosmos 世界基础模型: 大幅增强合成数据生成能力,为感知系统训练提供海量数据[5][11].
• 技术融合趋势:
随着 Isaac ROS、NVIDIA NITROS 等平台的不断发展,Isaac Sim 与其他 NVIDIA 技术将形成更加紧密的协同,为机器人操作、数据流水线生成和 AI 模型训练提供全新解决方案[12]。
8. 学习资源与社区支持
• 官方文档与教程:
NVIDIA 提供详尽的官方文档、快速入门指南及视频教程,涵盖 GUI、Python API 和 ROS 接口等各个方面[8][10]。
• 在线课程与直播:
如“模拟你的第一个机器人”课程和定期举办的 Isaac Sim Office Hours,为用户解答疑问、分享最佳实践。
• 开发者社区:
包括论坛、Discord 讨论组以及 GitHub 示例项目,帮助初学者与资深开发者交流,获取最新经验和技术支持。
9. 总结
NVIDIA Isaac Sim 是一款高度集成、功能全面的机器人仿真平台,其基于 NVIDIA Omniverse 构建的架构使得平台在物理仿真、传感器数据生成和实时渲染等方面具有无与伦比的优势。
• 对于新手来说, 从系统要求、安装方式到初步实践,都有详细的官方文档和丰富的在线资源支持;
• 在应用层面, 无论是用于研发教学、工业自动化、仓储物流,还是自动驾驶和移动机器人,Isaac Sim 都能提供高保真的虚拟环境,有效降低测试成本和风险;
• 展望未来, 随着新版本的不断迭代及与其他 NVIDIA 技术的深度融合,该平台将进一步推动机器人智能化、数字孪生和 AI 驱动的物理世界革新。
综合以上各方面内容,NVIDIA Isaac Sim 不仅是一个机器人仿真工具,更是一个开放、可扩展、跨平台的机器人开发生态系统,能够帮助开发者实现从仿真到真实部署的无缝过渡,为智能机器人和自动化领域带来深远影响。
参考资料:
[3] https://developer.nvidia.cn/isaac/sim
[6] http://zhaoxuhui.top/blog/2022/11/30/omniverse-and-isaac-sim-note2-installation-and-basic-use.html
[7] https://blog.marvik.ai/2024/11/26/exploring-nvidia-omniverse-and-isaac-sim/
[8] https://developer.nvidia.com/isaac/sim
[9] https://blogs.nvidia.cn/blog/isaac-jetson-robotics/
[10] https://www.bilibili.com/video/BV1EN4y1w7D5/
[12] https://developer.nvidia.cn/isaac/ros
[13] https://blog.csdn.net/m0_56661101/article/details/139766739